

-
協作機器人編程與調試
深度相機應用與調試
AGV物流小車編程與調試
復合機器人應用與調試
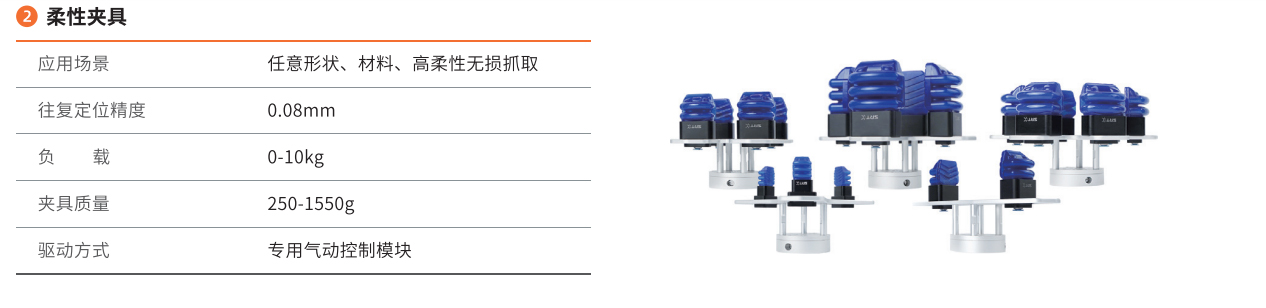
柔性夾具應用與調試
電氣控制系統調試

協作機器人與AGV復合機器人系統
柔性組合夾具
深度相機系統
電氣控制系統
農業采摘場景
機器人采摘實訓室主要面向農業水果采摘場景進行搭建,可作為學生與教師進行課程實驗與創新研發的實訓室。實訓室主要設備為智能采摘工作站,由AGV小車搭載機械臂,結合深度相機系統進行農業采摘方向的實驗教學與科學研究。
智能釆摘工作站包含:協作機器人模塊、柔性采摘模塊、AGV模塊、機器視覺模塊、場景模塊等教學模塊,以及配套的實驗指導教程。工作站融入了機器人控制技術、AGV自動導航技術、機器視覺技術、多傳感器融合技術、智能控制技術、數據通信技術等多種行業先進技術,涵蓋機器人、電氣傳動、機器視覺、圖像處理、人工智能、智能控制等多學科的專業知識。

協作機器人編程與調試
深度相機應用與調試
AGV物流小車編程與調試
復合機器人應用與調試
柔性夾具應用與調試
電氣控制系統調試
協作機器人系統操作實訓
協作機器人坐標系設置實訓
協作機器人軌跡編程實訓
協作機器人數據通信實訓
AGV物流小車設置實訓
AGV物流小車聯動實訓
復合機器人調試實訓
視覺系統認知實訓
視覺設備與控制器通訊實訓
視覺算法庫及開發工具認知實訓
視覺圖像特征提取算法開發實訓
基于人工智能的3D視覺自學習實訓
面向零散點云的擬合與分析方法研究
機器視覺算法功能模塊開發
視覺引導下的機器人路徑自適應實訓
基于3D視覺的不同物品抓取綜合實訓
柔性夾具安裝實訓
柔性夾具控制實訓
柔性夾具數據集成實訓
柔性夾具維護保養實訓
協作機器人現場編程
協作機器人工作站系統集成設計
AGV應用技術
機器視覺檢測應用
機器學習
人工智能






